RL 方法
- Policy-based
- learn 做事的 actor
- Value-based
- 不直接 learn policy,而是 Learn critic,負責批評
- Q-learning 屬於這種
Critic
- 不直接決定 action
- 給予 actor $\pi$,評估 actor $\pi$ 有多好
- critic 的 output 依賴於 actor 的表現
State Value Function
- State value function $V^{\pi}(s)$
- 用 actor $\pi$,看到 s 後玩到結束,cumulated reward expectation 是多少
評估方法
-
Monte-Carlo(MC) based approach
- critic 看 $\pi$ 玩遊戲
- 訓練一個 network,看到不同的 state ,輸出 cumulated reward(直到遊戲結束,以下稱為 $G_a$),解 regression 問題
-
Temporal-difference(TD) approach
- MC 的方法至少要玩到遊戲結束才可以 update network,但有些遊戲超長
- TD 只需要 {$s_t,a_t,r_t,s_{t+1}$}
- $V^{\pi}(s_t)=V^{\pi}(s_{t+1})+r_t$
- MC 的方法至少要玩到遊戲結束才可以 update network,但有些遊戲超長
-
MS v.s. TD
- MC
- Larger variance
- 每次的輸出差異很大
- Larger variance
- TD
- smaller variance
- 相較 $G_a$ 較小,因為這邊的 random variable 是 r,但 $G_a$ 是由很多 r 組合而成
- V 可能估得不準確
- 那 learn 出來的結果自然也不准
- 較常見
- smaller variance
- MC
Another Critic
-
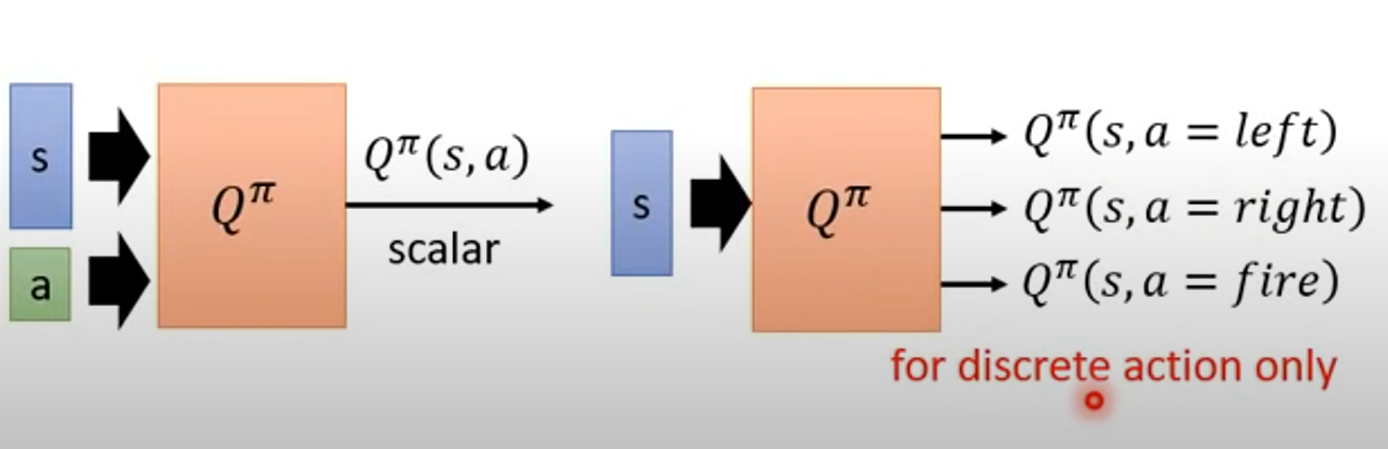
State-action value function $Q^\pi(s,a)$
- 又叫 Q function
- 當用 actor $\pi$ 時,在 state s 採取 a 這個 action 後的 cumulated reward expectation
- 有一個要注意的地方是,actor 看到 s 不一定會採取 a
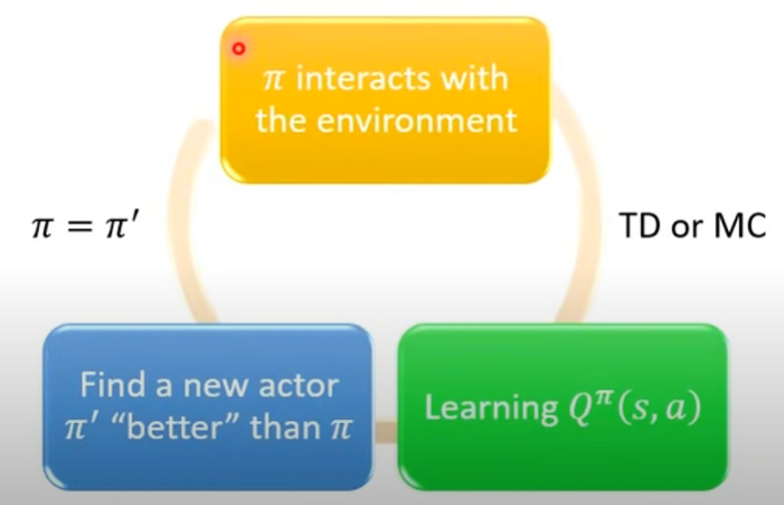
- 只要有 Q function,就可以找到"更好的” policy,再替換掉原本的 policy
- “更好的"定義
- $V^{\pi^{'}} \ge V^{\pi}(s), \text{for all state s}$
- $\pi^{'}(s)=arg \underset{a}{max}Q^{\pi}(s,a)$
- $\pi^{'}$ 沒有多餘的參數,就單純靠 Q function 推出來
- 這邊如果 a 是 continuous 的會有問題,等等解決
- 這樣就可以達到"更好的"policy,不過就不列證明了
- “更好的"定義
Basic Tip
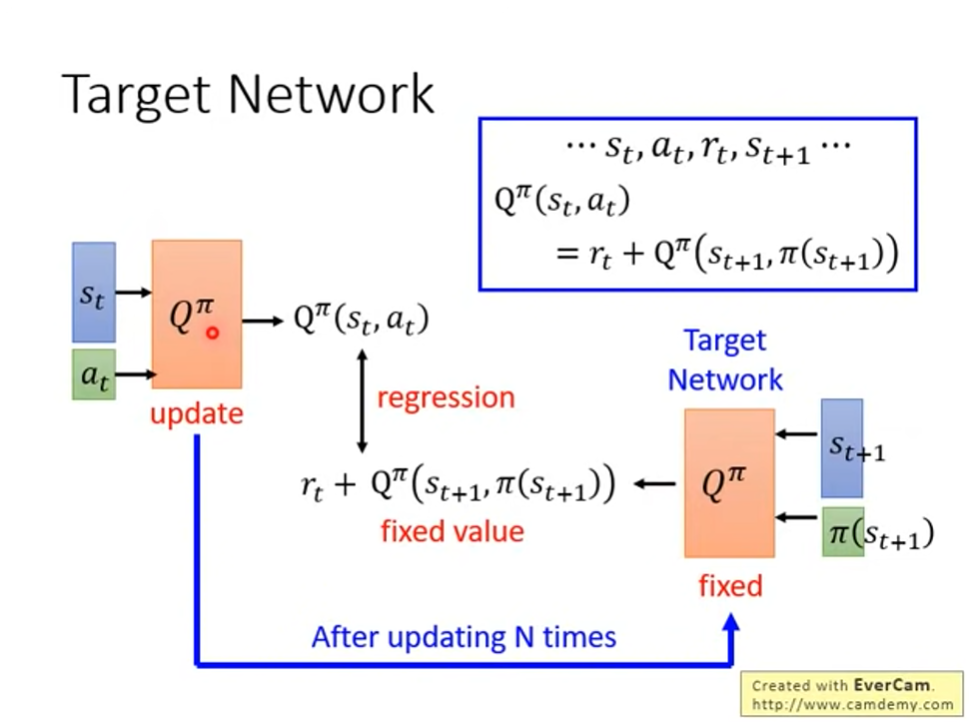
Target network
- 在 training 的時候,把其中一個 Q 固定住,不然要學的 target 是不固定的,會不好 train
Exploration
- policy 完全 depend on Q function
- 如果 action 總是固定,這不是好的 data collection 方法,要在 s 採取 a 過,才比較好估計 Q(s, a),如果 Q function 是 table 就根本不可能估出來,network 也會有一樣的問題,只是沒那麼嚴重。
解法
- Epsilon Greedy
- $a=\begin{cases} arg \underset{a}{max}Q(s,a), & \text{with probability } 1-\varepsilon \\ random, & otherwise \end{cases}$
- 通常 $\varepsilon$ 會隨時間遞減,因為你一開始 train 的時候不知道怎麼比較好
- Boltzmann Exploration
- $P(a|s)=\frac{exp(Q(s,a))}{\sum_a exp(Q(s,a))}$
Replay Buffer
- 把一堆的 {$s_t,a_t,r_t,s_{t+1}$} 存放在一個 buffer
- {$s_t,a_t,r_t,s_{t+1}$} 簡稱為 exp
- 裡面的 exp 可能來自於不同的 policy
- 在 buffer 裝滿的時候才把舊的資料丟掉
- 每次從 buffer 隨機挑一個 batch 出來,update Q function
好處
- 跟環境作互動很花時間,這樣可以減少跟環境作互動的次數
- 本來就希望 batch 裡的 data 越 diverse 越好,不會希望 batch 裡的 data 都是同性質的
issue
- 我們要觀察 $\pi$ 的 value,混雜了一些不是 $\pi$ 的 exp 到底有沒有關係?
- 理論上沒問題,但李老師沒解釋
Typical Q-learning 演算法
- 初始化 Q-fucntion Q,target Q-function $\hat{Q}=Q$
- 在每個 episode
- 對於每個 time step t
- 給 state $s_t$,根據 Q 執行 action $a_t$ (epsilon greedy)
- 獲得 reward $r_t$,到達 $s_{t+1}$
- 把 {$s_t,a_t,r_t,s_{t+1}$} 存到 buffer
- 從 buffer sample {$s_t,a_t,r_t,s_{t+1}$}(通常是一個 batch)
- Target $y=r_i+\underset{a}{max}\hat{Q}(s_{i+1},a)$
- Update Q 的參數,好讓 $Q(s_i,a_i)$ 更接近 y(regression)
- 每 C 步 reset $\hat{Q}=Q$
- 對於每個 time step t