Basic Components
- Actor
- Policy $\pi$ is a network with parameter $\theta$
- Env
- Reward Function
Trajectory
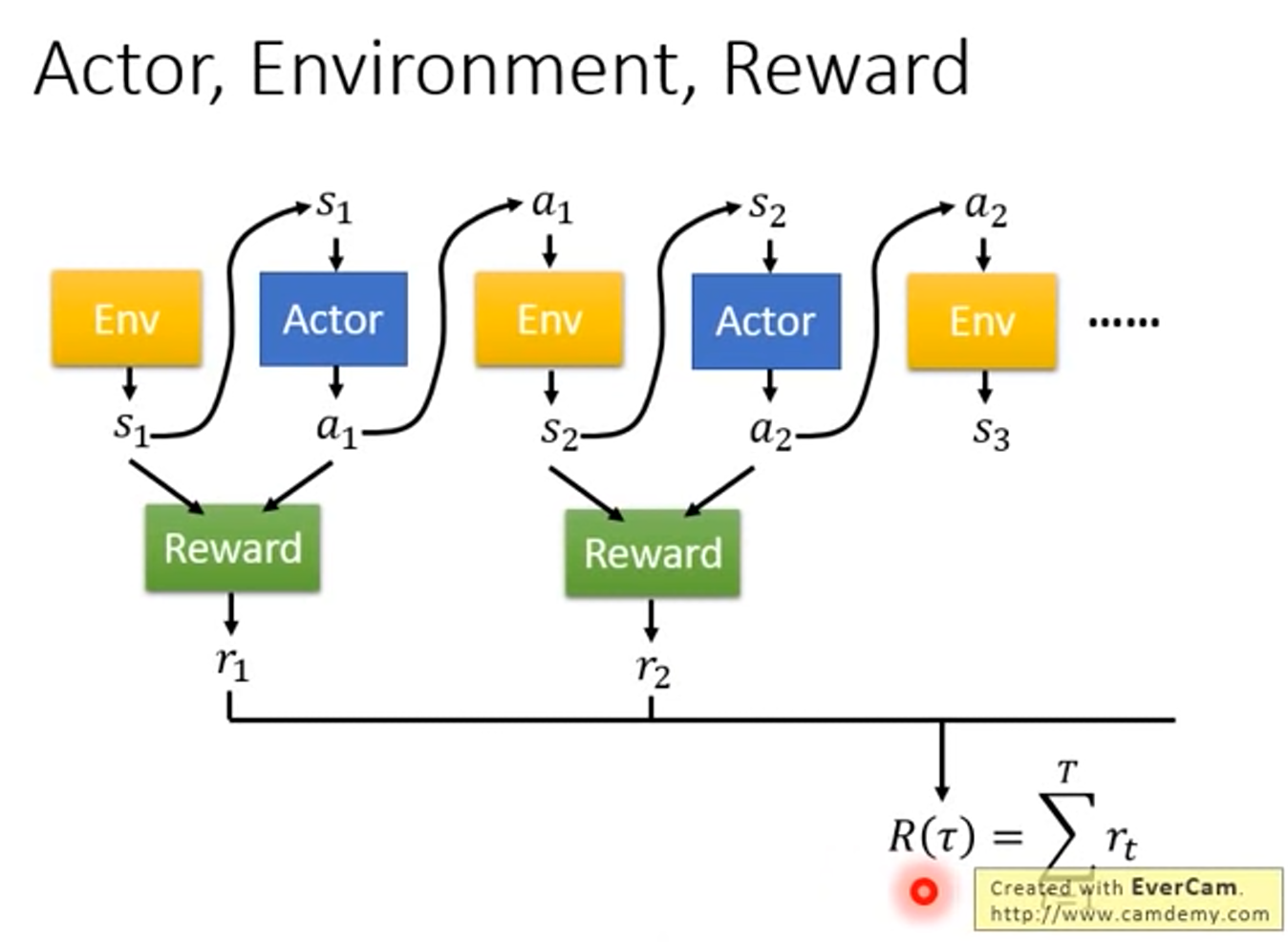
- 在一場遊戲,把 env 輸出的 s 和 actor 輸出的 a 串起來,是一個 Trajectory
- Trajectory $\tau$ = {$s_1,a_1,s_2,a_2,…,s_T,a_T$}
- $p_{\theta}(\tau)=p(s_1)\displaystyle\prod_{t=1}^Tp_{\theta}(a_t|s_t)p(s_{t+1}|s_t,a_t)$
Update
$\theta \leftarrow \theta + \eta \triangledown \overline{R}_{\theta}$
$\triangledown \overline{R_{\theta}} = \displaystyle\sum_{\tau} R(\tau) \triangledown p_{\theta} (\tau) \\ =\frac{1}{N}\displaystyle\sum_{n=1}^{N}\displaystyle\sum_{t=1}^{T_n}R(\tau^n)\triangledown log p_{\theta} (a_t^n|s_t^n)$
實作
- 常見公式
- $\triangledown f(x)=f(x)\triangledown logf(x)$
- 用當前模型蒐集一堆 Trajectory
- 更新模型
- 回到第一步
- 細節
- 做一個分類問題,把 state 當作分類器的 Input,把 action 當作分類器的 ground truth 作訓練
- 在實作分類問題的時候,objective function 都會寫成 minimize cross entropy,就是 maximize log likelihood
- RL 和一般分類的區別是,要記得在 loss 前面乘上 $R(\tau^n)$
Tip
- Add a Baseline
- $R(\tau^n)$ 有可能永遠都為正
- 此時等於告訴 Model 說,今天不管是什麼 action,都要提高它的機率。不一定會有問題,因為雖然都是正的,但正的量有大有小,可能某些 action 上升的幅度會更大。因為我們是在做 sampling,不一定會 sample 到某些 action,本來想的情況是所有的 trajectory 都會出現才沒問題。
- 解法: 希望 reward 不要總是正的
- $\triangledown \overline{R_{\theta}}\approx \frac{1}{N}\displaystyle\sum_{n=1}^{N}\displaystyle\sum_{t=1}^{T_n}(R(\tau^n)-b)\triangledown log p_{\theta}(a_t^n|s_t^n)$
- $b \approx E[R(\tau)]$
- $R(\tau^n)$ 有可能永遠都為正
- Assign Suitable Credit
- 原本整場遊戲的所有 action 都會乘上 $R(\tau)$,但這不太公平,因為就算結果是好的,不代表所有 action 都是對的,反之亦然。在理想的情況下,如果 sample 夠多,就可以解決這問題。
- 解法
- 只計算從這個 action 後的 reward 總和
- 因為前面的 reward 和你做了什麼沒關係
- 接續解法 1,把比較未來的 reward 做 discount
- 乘某個小於 1 的 $\gamma^{t^{'}-t}$
- 只計算從這個 action 後的 reward 總和
Advantage function
- base 可以是 state-dependent,可以根據 network 得出,以後再說
- $(Reward-b)$ 可以合起來看做 Advantage function $A^{\theta}(s_t,a_t)$
- 這邊 Reward 不管你是什麼形式,有沒有 discount。
- 它的意義是,這個 action 相較於其他的 action 有多好,而不是絕對好
- 這個 A 通常可以由某個類神經網路估計,那個類神經網路叫做 critic,以後講 Actor-Critic 的時候再說